研究人员开发了一种操作和重新配置软机器人的方法
软机器人正在为许多应用而着眼,因为它们的刚性对应物并不适合 - 包括与人类一起工作,挤入狭窄的地方,以及在体内提供药物和疗法。
一个关键的研究领域是如何远程有效地控制这些机器人,这样他们就可以在不受电线限制的情况下完成任务。为解决这个问题,北卡罗来纳州立大学和伊隆大学的研究人员开发了一种利用光场和磁场远程控制软机器人运动的技术,并设计了使用这种方法的机器人。
机器人,软机器人,药物和疗法,北卡罗来纳州立大学,伊隆大学,远程重新配置机器人
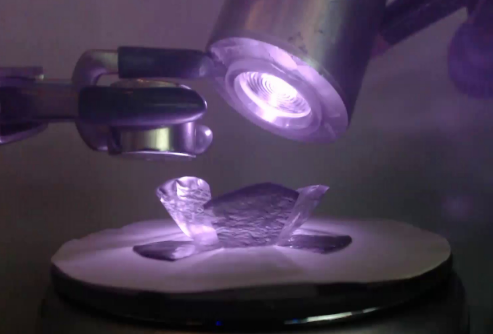
北卡罗来纳州(北卡罗莱纳州立大学)州立大学的研究人员使用光和磁铁展示了一个带有六个花瓣的“花”机器人的旋转。与磁铁下方的每隔一个花瓣旋转同步地打开LED会导致提升交替的花瓣,这些花瓣仍然被抬起。(图片来源:Jessica A.-C. Liu,NC State)
该技术使得研究人员不仅可以控制机器人的运动,而且可以根据需要将它们锁定在适当的位置,然后将其重新配置成新的形状,NC State的材料科学与工程教授Joe Tracy说。 。
虽然工业4.0等趋势正在加剧可用于推动新工厂和机器生产力水平的数据量,但机器制造商面临着如何从这些数据中推动业务价值的挑战。在本次网络研讨会上,施耐德电气着眼于工业物联网最新进展所揭示的新商机。
后者的能力对于生物医学和航空航天领域的应用特别有用,机器人可以执行各种任务,可能需要在飞行中重新利用,他说。
“通过设计材料的属性,我们可以远程控制软机器人的运动; 我们可以让它保持一个给定的形状; 然后我们可以将机器人恢复到原来的形状或进一步修改它的运动; 我们可以反复这样做,“特雷西在一份新闻声明中说。“就这项技术在生物医学或航空航天应用中的实用性而言,所有这些都是有价值的。”
他们说,虽然研究人员专注于创建一种远程重新配置机器人的方法,但他们还必须操纵这些材料,使其更加灵活,以满足他们的需求。
研究人员使用嵌有磁铁微粒的聚合物开发了这种机器人,这种聚合物通常很硬并且保持其形状。为了使材料更柔韧,研究人员使用LED发出的光来加热它,然后展示了如何通过使用磁场来控制由材料制成的机器人的形状。
他们说,一旦研究人员获得了他们想要的机器人的形状,他们就可以恢复原来的材料刚度,从而将形状锁定到位。为了让机器人恢复原来的形状,研究人员再次应用了光线并移除了磁场。
研究人员表示,他们还展示了通过再次应用光线并使用磁场移动机器人或采取新形状来改变机器人形状和运动的另一种选择。研究人员在“ 科学进展 ”杂志上发表了一篇论文,描述了他们的方法和实验。
尝试使用形状
研究人员进行了实验,他们展示了软机器人的不同配置。其中一个是“抓取器”,可以提升和运输物体,这在工厂装配线上很有用。据他们报道,研究人员开发的其他机器人包括一个折叠成花状形状的悬臂,其中“花瓣”向不同方向弯曲。
“我们不仅限于二进制配置,例如抓取器是打开还是关闭,”Jessica Liu,第一作者,博士。北卡罗来纳州立大学的研究人员在一份新闻声明中表示。“我们可以控制光线以确保机器人在任何位置保持其形状。”
他们说,为了促进未来的设计,研究人员还创建了一个简化设计过程的计算模型。该模型允许他们在制造旨在执行特定任务的软机器人之前优化机器人的形状,聚合物厚度,聚合物中铁微粒的数量以及所需磁场的大小和方向。